セマンティックセグメンテーション:画像をメトリクスに変換する
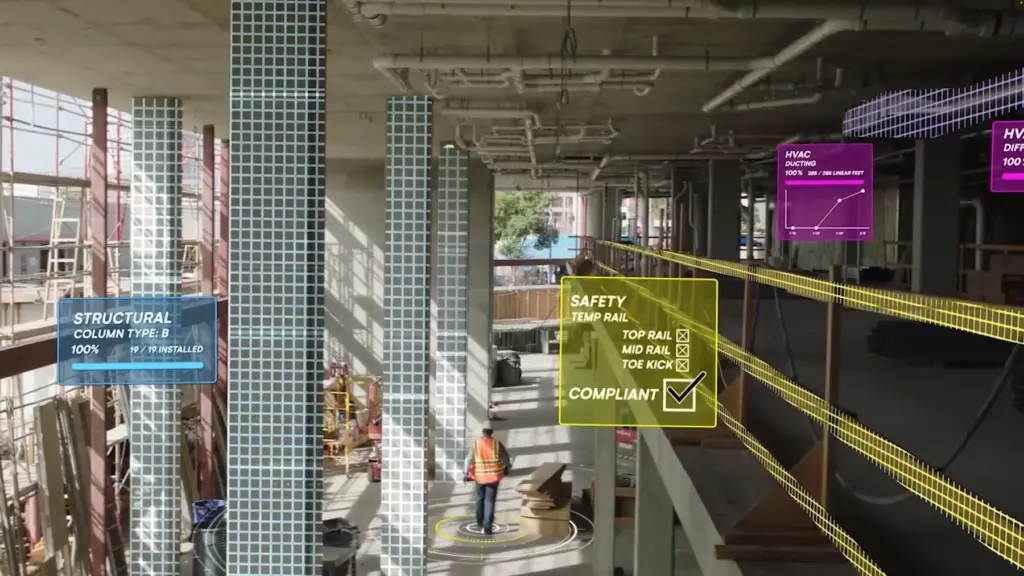
セマンティックセグメンテーションとは、画素を論理的な塊にグループ化するプロセスで、例えば、黄色のシャツの画素と赤いスカーフの画素を区別することができます。OpenSpaceでは、セマンティックセグメンテーションを利用して、建設業に特化したクラスと分類器を開発し、生画像を追跡・カウント可能な論理的セグメントに変換しています。
建設業界向けに特別に構築された当社独自のアルゴリズムは、MIT での創業者の仕事から始まった約 20 年にわたる共同研究開発の成果です。
コンピュータビジョンは、デジタル画像や動画を解釈し理解するためにコンピュータを訓練するAIの一分野です。自動運転車、産業用オートメーション、ロボット工学などで使用されています。OpenSpaceのVision Engineは、コンピュータビジョンを利用して、画像を自動的に1つの統合されたシーンに整列させ、主要な特徴を認識しラベル付けし、フロアプランにマッピングすることで、撮影した環境を視覚的に豊かに理解できるようにします。
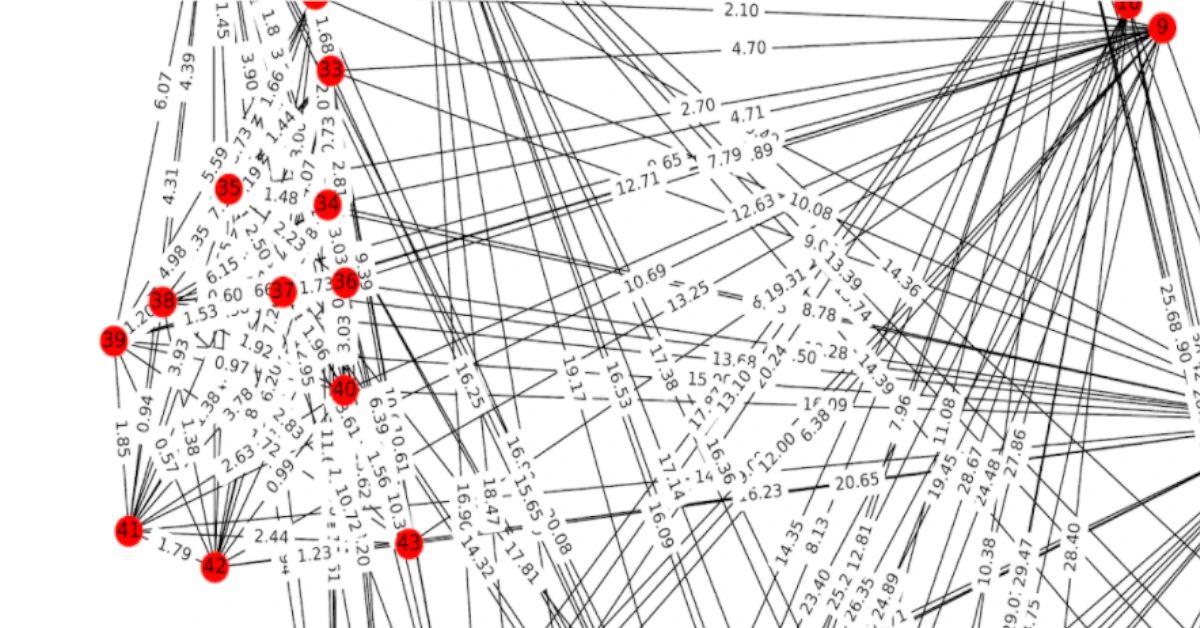
ビジョンエンジンは、3D再構成により、空間内の特徴を見つけ、3D環境を再現します。2つの画像の特徴を比較し、それらの特徴を最もよく配置するカメラ位置の推定値を計算します。このプロセスは、OpenSpaceの360°ビデオキャプチャ全体で何千回も繰り返され、3Dポイントクラウドが作成されます。点群によって、画像内の特徴と空間内の3Dロケーションが結びつけられます。
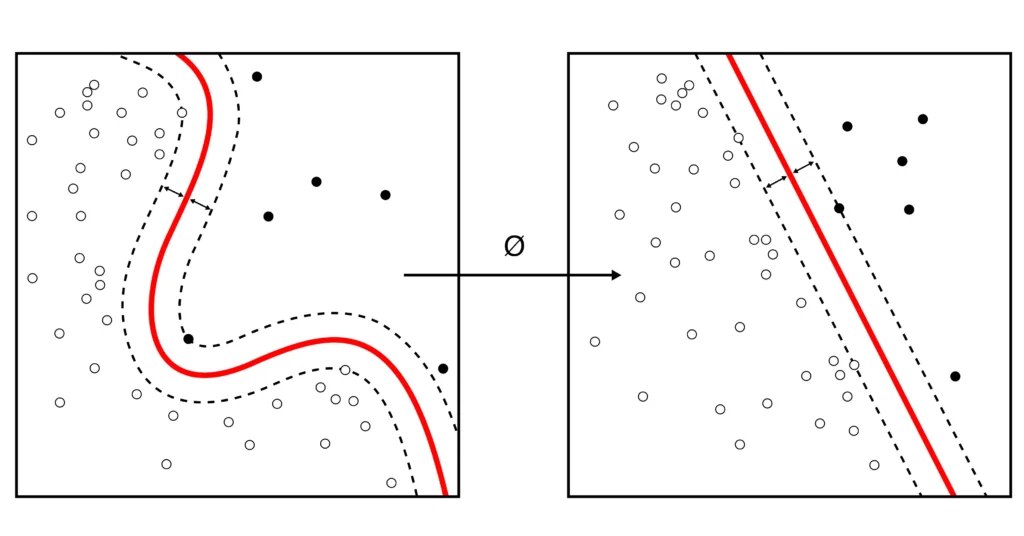
機械学習アルゴリズムは、トレーニングデータに基づいて数学的モデルを作成し、タスクを実行するように明示的にプログラムされることなく、将来の結果を予測します。ビジョンエンジンは、各キャプチャとウォークトラックをトレーニングデータセットとして使用します。あなたが現場を歩くたびに、Vision Engineはあなたがいる3D環境について少しずつ学習し、より速く、より正確に画像の位置合わせとマッピングを行います。
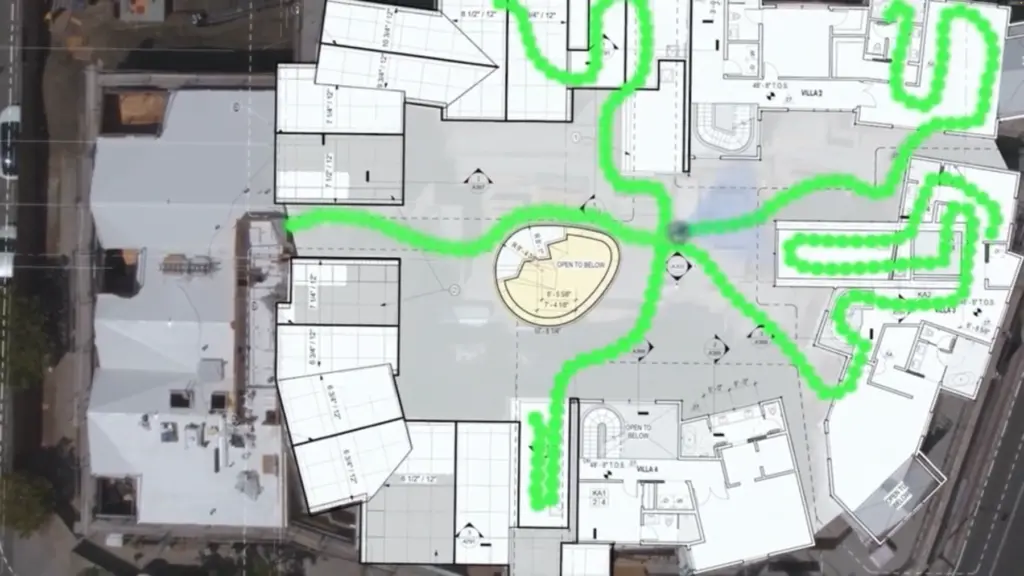
SLAM(Simultaneous Location and Mapping)とは、未知の環境を移動しながら同時に地図を構築する技術である。SLAMは、自動運転車のナビゲーションに使われるコアアルゴリズムの一つです。OpenSpaceでは、画像ベースのSLAMを用いて、平面図上の歩行者の経路を推定し、アルゴリズムが連続したデータを常に整列させて位置と経路を推定しています。

「自動化を謳う企業は他にもたくさんあるが、OpenSpaceは本当に自動化されています。私たちの多くは自分のやり方に固執していたが、OpenSpaceのソフトウェアを見たとき、私たちは圧倒されました」